
AutoNav RL
Robot Navigation with Multi-Obstacle Avoidance using Reinforcement Learning
Understading intellgience is a fundamental pursuit of human kind. What better way to understand it than to build it? At Skild AI, I am working towards that vision while pursuing a childhood dream of a future filled with robots.
harsh.mahesheka.res@gmail.com

Daniel Honerkamp*, Harsh Mahesheka*, Jan Ole von Hartz, Tim Welschehold, Abhinav Valada
Accepted at IEEE Robotics Automation Letters (RA-L)
Robot Navigation with Multi-Obstacle Avoidance using Reinforcement Learning
Multi-Agent Reinforcement Learning framework for Mesa Simulator
Fabricated a ground robot to perform household chores and baby care.

Designed and fabricated Omni-directional ROS-based mobile robot for warehouse delivery.

Implemented autonomus navigation on a physical wheelchair in indoor environment.
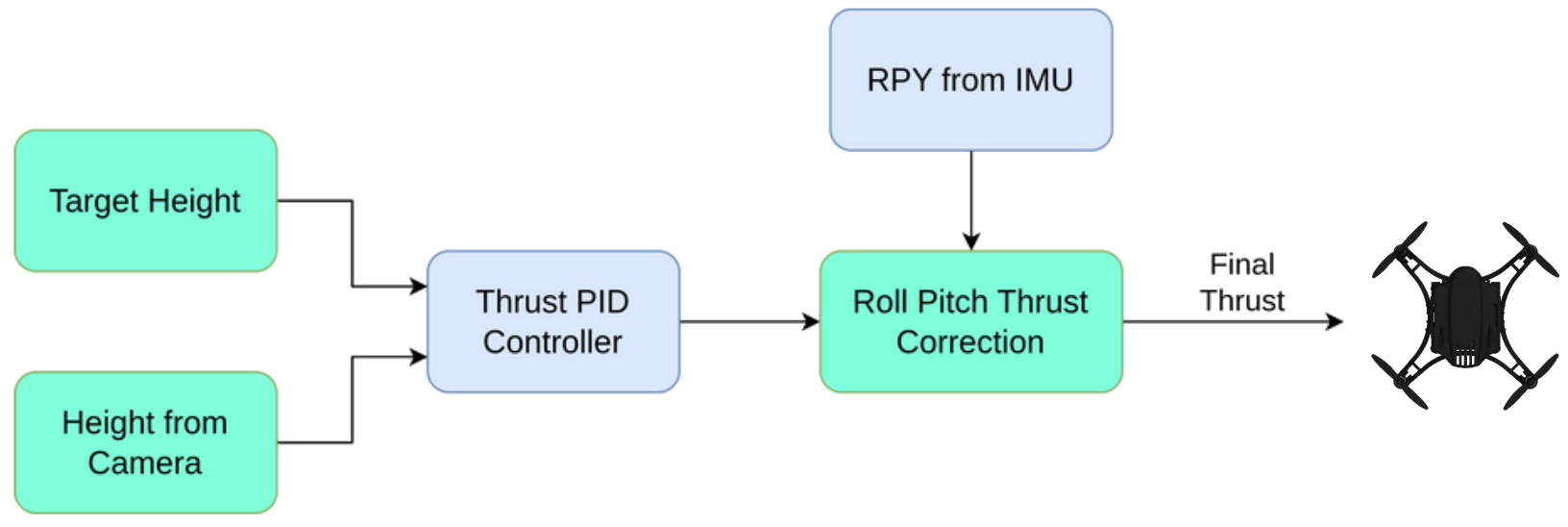
Cascaded PID-based control and swarm motion of drones.
UAV aided mapping and localization for a UGV to autonomously traverse in mountainous terrains.
Formulated an alternate design for biped locomotion, mimicking Jerboa.
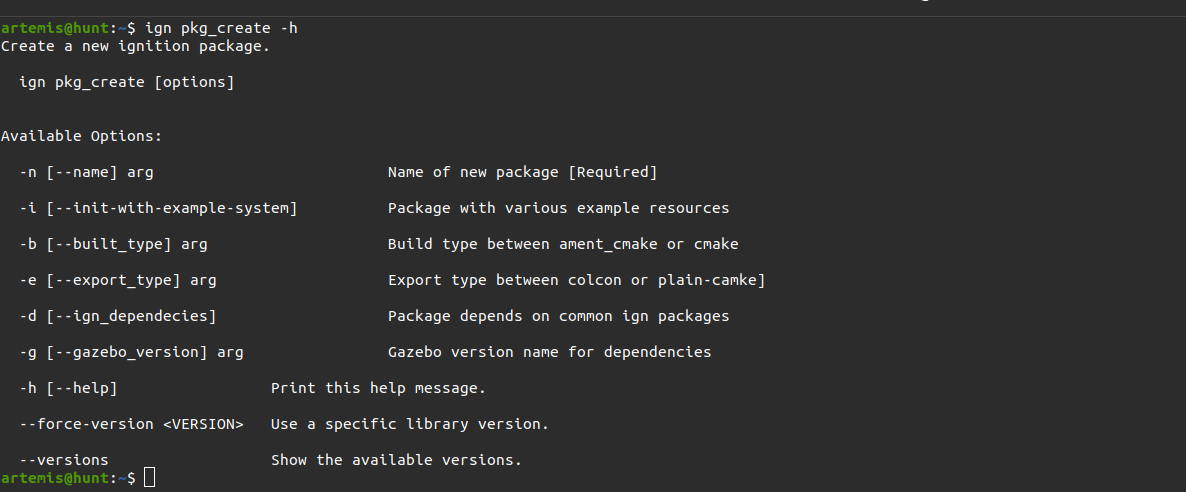
Tool for creating starter packages for gazebo simulator.
ROS integrated 4 DOF robotic arm, for sorting Cutlery.